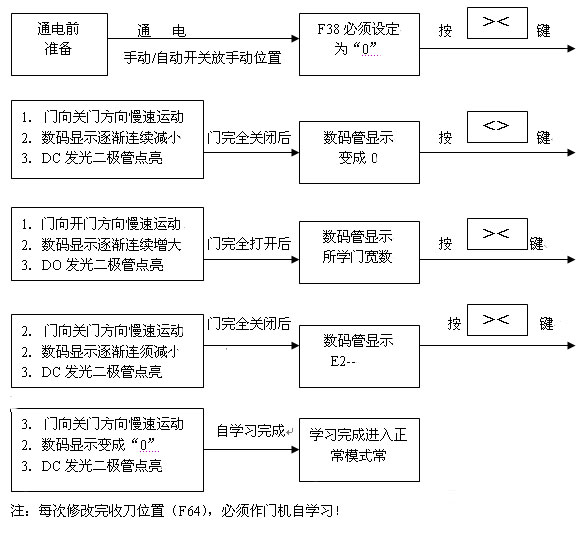
|
����
�� |
�� �� �� |
����
���� |
˵ �� |
|
F01 |
��ʾ���� |
2 |
"0 ����ʾ������ 1- ��ʾ�ٶ� 2- ��ʾ�ٷֱȡ� " |
|
F02 |
����ģʽ |
1 |
1 �������ڲ��������ߣ� 0 �����ö���٣�ÿ���ٶȺͻ���λ�ÿɵ��� |
|
F03 |
�ſ�У�� |
1 |
�˲�����������ҪΪ������ѧϰ�����е��� |
|
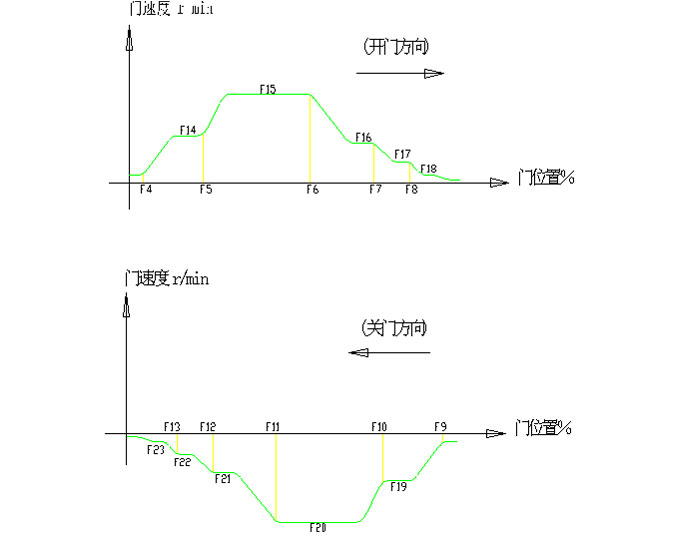
F04 |
���Ż���λ�� 1 |
2 |
С�ڸ�λ��ʱ��ʹ�á����ŷֶ��ٶ� 1 �� |
|
F05 |
���Ż���λ�� 2 |
20 |
���ڸ�λ��С�ڡ����Ż���λ�� 3 �� ʱ��ʹ�á����ŷֶ��ٶ� 2 �� |
|
F06 |
���Ż���λ�� 3 |
45 |
���ڸ�λ��С�ڡ����Ż���λ�� 4 �� ʱ��ʹ�á����ŷֶ��ٶ� 3 �� |
|
F07 |
���Ż���λ�� 4 |
90 |
���ڸ�λ��С�ڡ����Ż���λ�� 5 �� ʱ��ʹ�á����ŷֶ��ٶ� 4 �� |
|
F08 |
���Ż���λ�� 5 |
98 |
���ڸ�λ��ʱ��ʹ�á����ŷֶ��ٶ� 5 �� |
|
F09 |
���Ż���λ�� 1 |
98 |
���ڸ�λ��ʱ��ʹ�á����ŷֶ��ٶ� 1 �� |
|
F10 |
���Ż���λ�� 2 |
85 |
���ڸ�λ��С�ڡ����Ż���λ�� 1 �� ʱ��ʹ�á����ŷֶ��ٶ� 2 �� |
|
F11 |
���Ż���λ�� 3 |
45 |
���ڸ�λ��С�ڡ����Ż���λ�� 2 �� ʱ��ʹ�á����ŷֶ��ٶ� 3 �� |
|
F12 |
���Ż���λ�� 4 |
30 |
���ڸ�λ��С�ڡ����Ż���λ�� 3 �� ʱ��ʹ�á����ŷֶ��ٶ� 4 �� |
|
F13 |
���Ż���λ�� 5 |
4 |
С�ڸ�λ��ʱ��ʹ�á����ŷֶ��ٶ� 5 �� |
|
F14 |
���ŷֶ��ٶ� 1 |
10 |
��λΪ��ת / ÿ�֡� |
|
F15 |
���ŷֶ��ٶ� 2 |
105 |
��λΪ��ת / ÿ�֡� |
|
F16 |
���ŷֶ��ٶ� 3 |
115 |
��λΪ��ת / ÿ�֡� |
|
F17 |
���ŷֶ��ٶ� 4 |
70 |
��λΪ��ת / ÿ�֡� |
|
F18 |
���ŷֶ��ٶ� 5 |
12 |
��λΪ��ת / ÿ�֡� |
|
F19 |
���ŷֶ��ٶ� 1 |
20 |
��λΪ��ת / ÿ�֡� |
|
F20 |
���ŷֶ��ٶ� 2 |
80 |
��λΪ��ת / ÿ�֡� |
|
F21 |
���ŷֶ��ٶ� 3 |
115 |
��λΪ��ת / ÿ�֡� |
|
F22 |
���ŷֶ��ٶ� 4 |
65 |
��λΪ��ת / ÿ�֡� |
|
F23 |
���ŷֶ��ٶ� 5 |
10 |
��λΪ��ת / ÿ�֡� |
|
F24 |
����ת���� |
850 |
����ʱת�س�����ֵ�����Ż���ʼ�ƽ�������������ѧϰ�� |
|
F25 |
�����ƽ�ת���� |
150 |
���ſ��롱���Ż��ƽ�������ʹ�õ����ת�ء� |
|
F26 |
ǿ�з��ſ����ź� |
26 |
���Ź����ж��룬����ſ���������ſ��롱����ʱ�˲������趨��ʱ�䣬ǿ�з������ſ��롱�źţ���λΪ���롱������������ѧϰ�� |
|
F27 |
�����ƽ���ʱ |
100 |
���ſ��롱���Ż��ƽ���ʱ�䣬����ֵΪ 1000 ʱ���Ż�һֱ�ƽ��� |
|
F28 |
�����ƽ���ʱ |
90 |
���Ź��롱���Ż��ƽ���ʱ�䣬����ֵΪ 1000 ʱ���Ż�һֱ�ƽ��� |
|
F29 |
����ת���� |
500 |
����ʱת�س�����ֵ�����Ż��������������ſ��롱���ٴι��š� |
|
F30 |
�����ƽ�ת���� |
150 |
���Ź��롱���Ż��ƽ�������ʹ�õ����ת�ء� |
|
F31 |
�����ƽ��ٶ� |
5 |
�����ƽ�ʱ��ʹ�õ��ٶȡ� |
|
F32 |
�����ƽ��ٶ� |
3 |
�����ƽ�ʱ��ʹ�õ��ٶȡ� |
|
F33 |
ָ��λ�� |
30 |
�Ż����е���λ�������ָ��λ�á��̵����źš� |
|
F34 |
�ſ��� |
99 |
�Ż����е���λ��������ſ��롱�̵����źţ��Ż���ʼ�����ƽ��� |
|
F35 |
�Ź��� |
1 |
�Ż����е���λ��������Ź��롱�̵����źţ��Ż���ʼ�����ƽ��� |
|
F36 |
�����ٶ� |
80 |
�����ٶȣ���ֵԽ���ٶ�Խ�죬��֮��Ȼ�� |
|
F37 |
�����ٶ� |
80 |
�����ٶȣ���ֵԽ���ٶ�Խ�죬��֮��Ȼ�� |
|
F38 |
��ѧϰ����ģʽ |
0 |
"0 �������� 1- ���䡰���䡱�����������ϵ��λ������Ҫ����ѧϰ���������䡱����֮�෴ " �� |
|
F39 |
ǿ�ȹ����ٶ� |
25 |
���ƹ��ţ���ֵԽ���ٶ�Խ�졣 |
|
F40 |
�������� |
0 |
01�� Ƿѹ������ 02�� ��ѹ������ 04�� ���������� |
|
F41 |
�������� |
9999 |
�ò���Ϊһ�ض�ֵ�� 9999 ��ʱ�������������� |
|
F42 |
�������� |
9999 |
���ò���Ϊһ�ض�ֵ�� 9999 ��ʱ��������ʾ���ز����� F42 ����IJ������� |
|
F43 |
��ѧϰ�������� |
ѧϰ���� |
��ѧ�ſ������������� |
|
F44 |
��ѧϰ�����ٶ� |
20 |
��ѧϰ������ʱ���õ��ٶȡ� |
|
F45 |
KPSD |
450 |
PID ����ϵ���� |
|
F46 |
KPSD |
26 |
PID ����ϵ���� |
|
F47 |
KPSD |
0 |
PID ��ϵ���� |
|
F48 |
ģʽλ |
0 |
F48 ��Ԫ��д�롰 1 �� �ֳ��������� |
|
F49 |
ƫ����ѧϰ�趨 |
1 |
0 ��ѧϰ ,1 ����ѧϰ���û�����������ģ���������Ż������������� |
|
F50 |
��ѧƫ������ֵ |
ѧϰ���� |
����ǰ�趨���û�����������ģ���������Ż������������� |
|
F51 |
��λ����У����Χ |
5 �� |
���Ŵ��뷶ΧС�ڵ��� F51 ������Ԫֵ���Զ�У���� |
|
F52 |
��ѧϰת���� |
300 |
��ѧϰʹ�õ����ת�ء� |
|
F53 |
��ת�������������� |
151 |
�����Ź����б�����������������ԭ����ɵĵ����ת��������ֵ�� |
|
F54 |
��ת����ʱ�� |
10 |
������ת��������ֵ��������ʱ�䡣 |
|
F55 |
�ŵ�����ѡ�� |
0 |
0 �������첽�ŵ����ߣ� 1- ����ͬ���ŵ����� |
|
F56 |
���ұ������� |
1 |
�˲��������趨Ϊ 1 �������Ż��������� |
|
F57 |
���ұ������� |
1400 |
�������������м�⡣ |
|
F58 |
���ұ������� |
25 |
�������������м�⡣ |
|
F59 |
���ұ������� |
0 |
�������������м�⡣ |
|
F60 |
���ұ������� |
1300 |
�˲��������趨Ϊ 1300 �������Ż������������� |
|
F61 |
�ɶ����������������ſ��ȣ� |
2 |
1- �ɶ��� 2048 �������ת 8 Ȧ���� 2- �ɶ��� 4096 �������ת 16 Ȧ���� |
|
F62 |
�����ŵ��ת������ |
0 |
• ���ŵ���ῴ��˳ʱ�뷽��תΪ���ţ���ʱ�뷽��Ϊ���ţ�
• ���ŵ���ῴ��˳ʱ�뷽��תΪ���ţ���ʱ�뷽��Ϊ���š� |
|
F63 |
�յ��ٶ� |
50 |
����ʱ�����ȹرպ��ŵ��������ٶȡ�ע 1 ���� |
|
F64 |
�յ�λ�� |
30 |
���ȹرպ��ŵ������о��롲ע 1 ����ע 2 ���� |
|
F65 |
���ϸ�λʹ�� |
1 |
����ѹ��������ʾ�����ַ����ӿ��������λ���ȡ���� F65 ������ F65=1 ��λ�� F65=0 ����λ�� |