2��3Description of control panel
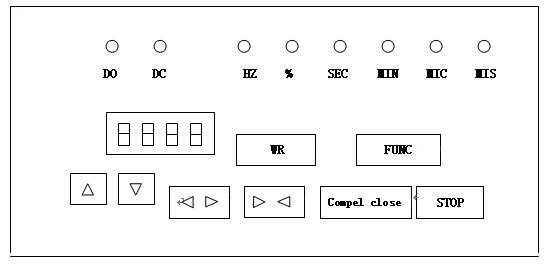
Setting the parameters for the device takes place via the control panel, which is fitted with eight push buttons as well as a four-place seven-segment display
2��3��1The transduce is in the door open state when the DO is light
2��3��2 The device is in the door close state when the DC is light.
2��3��3Showing the function frequency when the HZ is light.
2��3��4Showing the width percentage of the door open when the % is light.
2��3��5Showing the time measure when the SEC is light. (Sec.)
2��3��6Spare MIN��MIC��MIS
2��3��7��WR�� button, Storing the amended parameter to transduce.
2��3��8��FUNC�� button,Parameter number and altering parameter value.
2��3��9���ġ��š�button, Parameter number and setting parameter value.

 2��3��10 Close or open door button.
2��3��10 Close or open door button.
2��3��11 ��Compel close��button, keyset control the door compel close.
2.3.12��Stop��button, Function stop
����INSTALLATION AND CABLING OF TRANSDUCER
- Assembly position and space
3.1.1Exterior dimension:300mm��200mm��800mm(length��width��high) of type B��C��D transducer.
- Install the door-motor controller on the cabin roof in such a way, that good inspection of the display is guaranteed on the hand, and as little soiling of the door-motor controller as possible is guaranteed on the other.
- Terminal drawing and description
������������Terminal drawing for without aviation terminal of type B transducer

Strong power terminal description for without aviation terminal of type B transducer
|
Terminal-
Designation |
Terminal-
Number |
Functional description |
������ע |
|
�У� |
�� |
Voltage supply live wire��AC220V�� |
|
|
�� |
�� |
Voltage supply neutral conductor��AC220V�� |
|
|
�� |
�� |
Earth |
Y/G |
|
�� |
���� |
Motor connection �� |
|
|
�� |
���� |
Motor connection �� |
|
|
�� |
���� |
Motor connection �� |
|
������������Terminal drawing for with aviation terminal of type B transducer
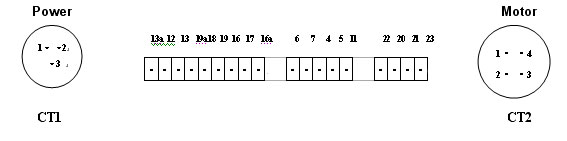
��������4 Strong power terminal description for withaviation terminal of type B transducer
|
Terminal-
Designation |
Terminal-
Number |
Functional description |
Note |
|
�ãԣ����� |
�� |
Voltage supply live wire��AC220V�� |
Br/R |
|
�ãԣ����� |
�� |
Voltage supply neutral conductor��AC220V�� |
Blue/Black |
|
�ãԣ����� |
�� |
Earth |
Y/G |
|
�ãԣ����� |
���� |
Motor connection �� |
Br/R |
|
�ãԣ����� |
���� |
Motor connection �� |
Blue |
|
�ãԣ����� |
���� |
Motor connection �� |
Black |
|
�ãԣ����� |
�� |
Earth |
Y/G |
- Converter port introductions of type B frequency
- The other terminal description of type B transducer
|
Terminal-
Designation |
Terminal-
Number |
Functional description |
|
�ʣ���
|
������
|
��Door open��, output open connection
|
|
�ʣ���
|
���� |
��Door open��, output common connection |
|
�ʣ��� |
���� |
��Door open��, output closed connection |
|
�ʣ��� |
���� |
��Door position��, output opened connection |
|
�ʣ��� |
���� |
��Door position��, output common connection |
|
�ʣ��� |
������ |
��Door position��, output closed connection |
|
�ʣ��� |
���� |
��Door close��, output common connection |
|
�ʣ��� |
���� |
��Door close��, output closed connection |
|
�ʣ��� |
������ |
��Door close��, output opened connection |
|
�ɣΣ� |
�� |
��Open door��-command |
|
�ɣΣ� |
�� |
��Close door��-command |
|
�ɣΣ� |
�� |
��Stop��-command |
|
�ɣΣ� |
�� |
��Nudge��-command (Closing the door with slower constant speed) |
|
���� |
���� |
Common connection for inputs |
|
�ӣ� |
���� |
Encoder pulse input A |
|
�ӣ� |
���� |
Encoder pulse input B |
|
������ |
���� |
Encoder voltage supply+12V |
|
���� |
���� |
Encoder voltage supply 0V |
3��2��6 Terminal drawing of type C transducer
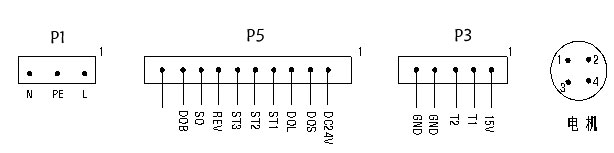
3��2��7P1 plug of type C transducer is AC220V and description for all feet.
|
Plug position |
Wire |
Function |
Note |
|
P1�� 1 |
L |
Power supply live wire(AC220V) |
Red/Brown |
|
P1�� 2 |
PE |
Earthing |
Yellow/Green |
|
P1�� 3 |
N |
Power supply neutral conductor(AC220V) |
Blue/Black |
3��2��8P3 plug transducer encoder and description for all feet.
|
Plug position |
Wire |
Function |
Note |
|
P3�� 1 |
15V |
Encoder power supplyDC+15V |
Brown |
|
P3�� 2 |
T1 |
Encoder Pulse input A |
Yellow |
|
P3�� 3 |
T2 |
Encoder Pulse input A |
Green |
|
P3�� 4 |
GND |
Power supply GND |
White |
|
P3�� 5 |
GND |
Power supply GND |
White |
3��2��9P5 plug of type C transducer is control command and description for all feet.
|
Plug position |
Wire |
Function |
Note |
|
P5��1 |
24VDC |
Power supply DC24V |
|
|
P5��2 |
DOS |
Reopen door output |
|
|
P5��3 |
DOL |
Door open output |
|
|
P5��4 |
ST1 |
Three wire coding command input |
|
|
P5��5 |
ST2 |
Three wire coding command input |
|
|
P5��6 |
ST3 |
Three wire coding command input |
|
|
P5��7 |
REV |
Reverse open door command input |
|
|
P5��9 |
DOB |
Open door button command input |
|
3��2��10CT2 plug of type C transducer and description for all feet.
|
CT2 motor aviation plug |
Wire |
Function |
Note |
|
CT2��1 |
24 |
Transducer output U connect with motor U |
Brown/Red |
|
CT2��2 |
25 |
Transducer output V connect with motor V |
Blue |
|
CT2��3 |
26 |
Transducer output W connect with motor W |
Black |
|
CT2��4 |
E |
Earthing |
Y/G |
3��2��11Terminal drawing of type D transducer
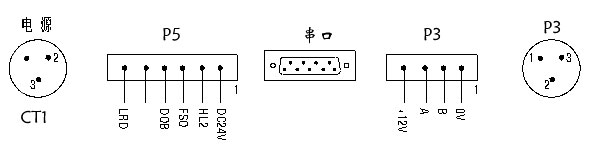
3��2��12CT1 plug of type D transducer is AC220V and description for all feet
|
Plug position |
Wire |
Function |
Note |
|
CT1��1 |
L |
Power supply live wire(AC220V) |
Red/Brown |
|
CT1��2 |
N |
Power supply neutral conductor(AC220V) |
Blue/Black |
|
CT1��3 |
E |
Earthing |
Y/G |
3��2��13P2 plug of type D transducer is AC110V and description for all feet
|
Plug position |
Wire |
Function |
Note |
|
P2��1 |
AC110V |
Emergency circuit AC110V |
Red/Brown |
|
P2��2 |
HL1 |
HL1 |
Blue/Black |
3��2��14P3 plug transducer encoder and description for all feet.
|
Plug position |
Wire |
Function |
Note |
|
P3��1 |
0V |
Power supply GND |
White |
|
P3��2 |
B |
Encoder Pulse input A |
Green |
|
P3��3 |
A |
Encoder Pulse input A |
Yellow |
|
P3��4 |
+12V |
Power supply GND |
Brown |
3��2��15P5 plug of type D transducer is control command and description for all feet.
|
Plug position |
Wire |
Function |
Note |
|
P5��1 |
DC240V |
DC24V |
|
|
P5��2 |
HL2 |
Earthings |
|
|
P5��3 |
FSO |
Door zone signal input side |
|
|
P5��4 |
DOB |
Door open button command input side |
|
|
P5��6 |
LRD |
Door protection reopen door command input side |
|
3��2��16CT2 plug of type D transducer and description for all feet
|
Plug position |
Wire |
Function |
Note |
|
CT2��1 |
U |
Transducer output U connect with motor U |
Brown/Red |
|
CT2��2 |
V |
Transducer output V connect with motor V |
Blue |
|
CT2��3 |
W |
Transducer output W connect with motor W |
Black |
|
CT2��4 |
E |
Earthing |
Y/G |
3��2��179 pin serial-wound plug description
9 pin type D plug is serial-wound, it connect with communication wire or TT.
3��3 Cabling requirement
3��3��1 All signal control wires are designed for a cable cross-section of 0.5 to 0.75mm2.
3��3��2 Power supply wires designed for a cable cross-section of 1to 1.5mm2 and use three cores with Y/G earthing, motor use four cores with Y/G.
4 .PARAMETERS FORM AND PARAMETERS FOR FUNCTION
4. 1 Parameters form (see Parameter overview)
Parameter overview
|
Parameter-NO. |
Description |
Setting range |
Setting value |
Unit |
|
F00 |
Setting frequency |
--- |
--- |
-- |
|
F01 |
Lowest frequency |
0.1-4.0 |
0.45 |
Hz |
|
F02 |
Highest frequency |
30-60 |
50 |
Hz |
|
F03 |
Basic torque frequency of open door |
30-500 |
55 |
Hz |
|
F04 |
Supplement of low frequency torque of open door |
0-15 |
8 |
% |
|
F05 |
Accelerating time of learning run |
01-99.9 |
20 |
Sec. |
|
F06 |
Decelerating time of learning run |
0.1-99.9 |
10 |
Sec. |
|
F07 |
Spare wheel |
--- |
--- |
-- |
|
F08 |
Decelerating time of reversal |
01-99.9 |
10 |
Sec. |
|
F09 |
Normal accelerating time |
0.1-99.9 |
10 |
Sec. |
|
F10 |
Normal decelerating time |
0.1-99.9 |
15 |
Sec. |
|
F11 |
Control mode |
0��1��2�� |
0 |
-- |
|
F12 |
Stop mode |
0��1�� |
0 |
-- |
|
F13 |
Methods of position measure |
2 |
2 |
-- |
|
F14 |
Emendation of door width |
0-10 |
2 |
% |
|
F15 |
Learning-run mode |
1 |
1 |
-- |
|
F16 |
Direct current brake frequency |
0.45-1.00 |
0.45 |
HZ |
|
F17 |
Direct current brake time |
2 |
2 |
Sec. |
|
F18 |
Brake intensity |
2 |
2 |
HZ |
|
F19 |
Carrier wave Frequency |
4000-16000 |
14000 |
HZ |
|
F20 |
Data protect |
0-9999 |
279 |
-- |
|
F21 |
Electrify morra |
0-400 |
400 |
-- |
|
F22 |
Output manner of wave form |
0��1��2��3 |
1 |
-- |
|
F23 |
Time of dead zoon (user be careful) |
3 |
3 |
Sec. |
|
F24 |
Torque monitor 0:inefficacy
1:efficiency |
0��1 |
1 |
-- |
|
F25 |
Throw-over position of open door |
0-15 |
6 |
% |
|
F26 |
Throw-over position of open door |
15-30 |
26 |
% |
|
F27 |
Throw-over position of open door |
50-80 |
50 |
% |
|
F28 |
Throw-over position of open door |
80-100 |
95 |
% |
|
F29 |
Throw-over position of close door |
100-90 |
98 |
% |
|
F30 |
Throw-over position of close door |
90-60 |
85 |
% |
|
F31 |
Throw-over position of close door |
50-35 |
50 |
% |
|
F32 |
Throw-over position of close door |
35-0 |
10 |
% |
|
F33 |
Subsection speed of open door |
0.45-10 |
4 |
HZ |
|
F34 |
Subsection speed of open door |
10-50 |
22 |
HZ |
|
F35 |
Subsection speed of open door |
0.45-10 |
4 |
HZ |
|
F36 |
Subsection speed of open door |
0.45-10 |
4 |
HZ |
|
F37 |
Subsection speed of close door |
0.45-10 |
4 |
HZ |
|
F38 |
Subsection speed of close door |
10-50 |
12 |
HZ |
|
F39 |
Subsection speed of close door |
0.45-10 |
4 |
HZ |
|
F40 |
Subsection speed of close door |
0.45-10 |
4 |
HZ |
|
F41 |
Output setting of position relay |
0-34 |
30 |
% |
|
F42 |
Pushing time of close door |
0-100 |
90 |
��
Sec. |
|
F43 |
Pushing time of open door |
0-100 |
100 |
��
Sec. |
|
F44 |
Pushing time of learning run |
0-10 |
2 |
��
Sec. |
|
F45 |
Displaying parameter value |
0��1��2��3 |
2 |
-- |
|
F46 |
Normal speed of learning run |
0.45-50 |
12 |
HZ |
|
F47 |
Pushing speed of learning run |
0.47-10 |
3 |
HZ |
|
F48 |
Speed of compel close door |
0.48-20 |
12 |
HZ |
|
F49 |
Torque frequency of learning run |
40-100 |
50 |
-- |
|
F50 |
The sum of pulses of learning run |
0-9999 |
--- |
-- |
|
F51 |
Basic torque frequency of close door |
30-500 |
65 |
HZ |
|
F52 |
Manner of low frequency torque of close door |
0-15 |
8 |
% |
|
F53 |
Relay signal of open door completely |
90-99 |
90 |
% |
|
F54 |
Relay signal of closedoorcompletely |
1-10 |
5 |
% |
|
F55 |
Fault renew mode when meet UO or OC |
0��1 |
1 |
-- |
|
F56 |
Learning run memory mode |
0��1��2 |
0 |
-- |
|
F57 |
Time of morra signal of compel close door |
0-10 |
2 |
Sec. |
|
F58 |
Adjusted frequency mode |
0��1 |
1 |
-- |
4��2Description of parameters for type B,C,D transducer.
4��2��1 F03 regulates basic torque frequency of open door, torque decreases when it increases
4��2��2F04 regulates low-frequency torque equalizing of open door, torque increases when it increases.
4��2��3F05, F06 are accelerate-decelerate speeds times of learning run, learning run can go along all right by adjusting these parameters.
4��2��4F08 is reversal decelerate speed time, by adjusting this parameter, door can travel in smooth curve when it treats light curtain with torque monitoring.
4��2��5F09 normal accelerating time,F10 normal decelerating time. Adjusting this parameter door can travel in smooth curve when it normal run.
4��2��6F11: control mode. F11=0 panel control mode; F11=1, manual mode. F11=2,nomal mode.
4��2��7Door width emendation parameter (F14)
This parameter is used for eliminating pulse error caused by encoder error, door-motor error and so on during learning run.
4��2��8F19 is carrier wave frequency. Value of this parameter directly impact noise during machine function.
4��2��9F20 is data protecting parameter, each parameter must be modified under the special parameter ��279��, otherwise it��s not effective.
4��2��10Close force moment monitoring parameter
Setting F24 to ��1��, close force moment monitoring is effective when setting it to ��0�� leads to inefficacy. See 8th for detailed meaning.
4��2��11F25��F26��F27��F28 throw-over position of open door .speed throw-over position as open door, in throw-over position exit 0��F25��F26��F27��F28��100%
4��2��12F29��F30��F31��F32 throw-over position of close door .speed throw-over position as close door, in throw-over position exit 0��F32��F31��F30��F29��100%
4��2��13F33��F34��F35��F36 subsection speed of door open, a process of open door divide in four section speed , F33~ F36 is four section speed.
4��2��14F37��F38��F39��F40 subsection speed of door close, a process of close door divide in four section speed , F37~ F40 is four section speed.
4��2��15F14 is position relay output parameter. It displays position percentage, when door travel in this range, protecting position of car door is noneffective, protecting device means safety touching ban or light curtain.
4��2��16F42 is close door pushing time parameter. Under this parameter, though door closed completely, there is a holding time of low-frequency force moment for drastically closing door completely.
4��2��17F43 is open door pushing time parameter, the same as F42.
4��2��18F44 pushing time of learning run , the same as F42,F43,only work in learning.
4��2��19 Normal speed of learning run: F46 regulates normal speed of learning run.
F47 push speed of learning run. Adjust this parameter change speed of learning .
4��2��20F48 speed of compel close door , adjusting parameter change speed of light push.
4��2��21 F49 torque frequency of learning run ,torque decreases when it increases
4��2��22 Close door basic torque frequency parameter: F51 regulates close door basic torque, torque decreases when it increases.
4��2��23F52 regulates close door low-frequency torque equalizing, torque increases when it increases.
4��2��24F53 regulates ��Open door completely�� relay output signal position. F54 regulates ��Close door completely�� relay output signal.
4��2��25Setting F55 to ��0��, the fault-protecting device is in stop condition when meet UO or OC. Connecting voltage over again or pressing stop signal can do renewing normal state; Setting F55 to ��1��, the fault-protecting device connects any signal can do renewing normal state automatically.
4��2��26F56: Learning run memory mode. Setting F56 to ��0��, device repeats to remember learning run pulse number and remembering the last number, renewing after no power, if the discrepancy between pulse numbers since meet learning-run mode and the last learning run pulse number is more than ��15, device will renew learning run and it switches to normal mode automatically when the discrepancy is less than ��15. Setting F56 to ��1��, device renews learning run, and switches to normal mode automatically without compare to remembered pulse.
5��ADJUSTMENT AND OPERATION OF TRANSDUCER
5��1 Cabling diagram
Checking the cabling of the door-motor controller.
5��2 Encoder cabling
5��2��1 Sketch map
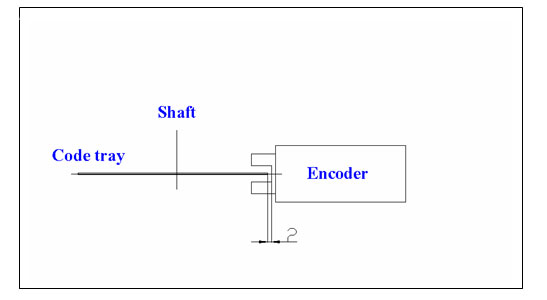
Encoder4 wire a definition: Encoder cabling
Brown ��DC12V
White ��0V
Yellow�� pulse A
Green ��pulse B
5��3Initiating the learning run of type B,C, D
5��3��1 Connecting the main power supply, the device will be in learning-run mode automatically. Displaying software version number-��Hd47�� on screen, following is the sparking ��20.000��, the panel is dark.
5��3��2 Opening the door to 50% by hand, in order to make sure the moving direction of the door under connecting the power supply and effective command of the door .Checking steps: Displaying F00 on screen by pressing ��FUNC�� button, pressing ���ġ�until displaying F11, pressing ��FUNC�� button to display o, that F11=0 is the keyset mode. If F11=1 or 2, pressing ���ġ�until it is ��0��,pressing ��WR�� button until displaying ��E2-��,then displaying ��0��,that means the device has been in keyset mode.
5��3��3 The learning-run course of Door Motor transducer(Version number Hd57) :
The door must receives ��close�� command, then closes in a slow speed. Before the door closing completely, it should receive an ��open�� command and stop closing. After fully closing, it receives ��open�� command again and does learning-run of door opening in a slow speed. The process of door opening learning-run is same as Closing. when the transducer display 100% ,the learning run finish. It turn to automation mode . storing the learning result to transducer.When change parameters , user turn off the DO,DC. Finishing learn push the stop button. By connecting the device power supply or pressing the ��Compel close�� and ��Stop�� buttons at the same time.
To Hd57 learning run , through the door-motor controller counting the number of pulses delivered by the encoder during the learning run. After connecting the power supply, the door-motor controller is always in learning-run mode, ��Hd57�� is showed on screen, then ��20.00�� is showed, identified by sparking. During learning-run mode, the device waits for a ��close�� or ��open�� command, until the cabin door is fully closed. Subsequently, an ��open door�� command initiates the actual learning-run.
The process of learning : Add door close command(manual through panel operation F11=0, automation through terminal operation ) After fully closing, it receives ��open�� command again and does learning-run of door opening in a slow speed. The process of door opening learning-run is same as Closing. when the transducer display 100% ,the learning run finish. It turn to automation mode . storing the learning result to transducer.
5��4Adjusting parameters for type B,C,D
5��4��1 Adjusting open state
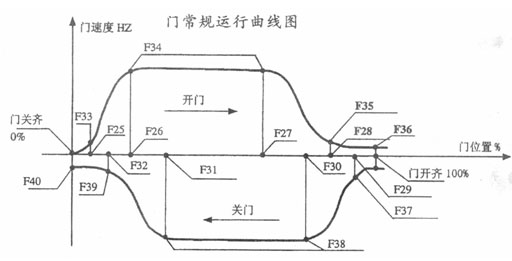
From door open run curve, we can see F25��F28 four throw-over speed position corresponding F33��F36. Alter F33 change door open originationSpeed, alter F34 change door open run Speed,alter F35,F36 change door open end Speed, F33��F36 speed increases when it increases.
From door open run curve, we can see F29��F32 four throw-over speed position corresponding F37��F40. Alter F37 change door open origination Speed, alter F38 change door open run Speed,alter F39,F40 change door open end Speed, F37��F40 speed increases when it increases.
From F25��F28 changecan alter door open throw-over position speed,
Time of throw-over speed earlier when it smaller.
From F29��F32 changecan alter door open throw-over position speed,
Time of throw-over speed earlier when it larger.
5��4��2 Adjusting learning run state
F46 normal speed of learning run ,door run speed faster when it larger.
F49 torque frequency of learning run , torque smaller when it larger.
5��4��3��Description of type C transducer open/close command
|
Terminal difinition |
Function |
|
ST3 |
ST2 |
ST1 |
DOB |
REV |
|
0 |
0 |
0 |
1 |
1 |
open door |
|
0 |
0 |
1 |
1 |
1 |
close door |
|
0 |
1 |
0 |
1 |
1 |
close door |
|
1 |
0 |
1 |
1 |
1 |
close door |
|
1 |
1 |
0 |
�� |
�� |
compel close door |
|
�� |
�� |
�� |
1 |
0 |
open door |
|
�� |
�� |
�� |
0 |
1 |
open door |
Note: ����������Any state, ��1�� or ��0��
5��4��4Adjustment methods of type D transducer
Panel operation methods is same as type B door-motor transducer.
Automation control mode set F11=2 that achieve series-wound control open/close door or insert TT, TT operate door-motor .
6��ERROR IDENTIFICATION AND ERROR ELIMINATION
After door-motor controller connects power supply, version number of software will be displayed momently, version number is Hd29, please contact customer department if you have problems with the door-motor.
|
Error description |
Possible cause |
Remedy |
|
No display on thescreen |
Mains supply is missing |
Check mains voltage and set device mains switch to ��ON�� |
|
Direction of door movement does not correspond with the door commands |
Defective control line connection |
Check input states at control line indicators DO, DC |
|
Rotational direction of motor is reversed |
Exchange motor line phases |
|
Display sudden from��0��to ��100%�� during learning run, and with noise of relay |
Encoder pulse outputs reversed |
Exchange encoder outputs on terminals 20 and 21 |
|
Encoder badly adjusted |
Adjust plane and code tray distance of encoder |
|
Encoder defect |
Exchange encoder |
|
Strike the end position causes loud noise when open door incompletely or fully duringlearning run |
Too little torque or excessive torque during learning run |
Decrease or increase the value of F49 |
|
Door does not open fully |
Too little torque of slow speed force moment |
Increase the value of F04 |
|
Strike the end position when open door fully |
Excessive basic torque |
Increase the value of F03 |
|
Excessive low-frequency torque |
Decease the value of F04 |
|
Remain slow speed travel until open door fully |
Encoder defect |
Check encoder |
|
The door-position indicator does not correspond with the actual door position |
Encoder badly adjusted |
Check assembly |
|
Encoder defect |
Exchange encoder |
|
Display OU |
Outside voltage net defect |
Check voltage value of outside voltage net |
|
Display OC
|
Too rapid accelerate time |
Adjust F09, F10 |
|
Excessive torque |
Adjust F03, F51 |
|
Three phases output short |
Check motor cabling |
|
Disturb voltage in open, close door signal |
Check disturb voltage |
|
Transducer defect |
Exchange door-motor transducer |
6��1 When manual open, close door is normal and switching to control manner of controller, door dose not open or close at flat floor. In this case, first, judging if it is the door-motor transducer defect, methods below:
- Go through checking if the control manners of door-motor transducer are correct, viz. F11=2.
- When F11=2, short connecting open, close door signal of door-motor transducer by short connection, viz. terminals 4 and 11 are short connected to open door signal, terminals 5 and 11 are short connected to close door signal. Checking if the transducer function normally or not, if not is the door-motor transducer defect. If the door-motor transducer function normally by above operation, it means there��s no problem with door-motor transducer, please check outside wiring. Methods below:
��1��.If the DO, DC relay function of controller is normal or not.
��2��.If the DO, DC signals are given to terminals of door-motor transducer or not.
��3��.If the resistance values of the DO, DC relay points are excessive or not. (The value shouldn��t overrun 0.1��)
6��2 In normal mode, sometimes close door fully but throw open. Checking below:
- Judging if the door-motor transducer is normal or not. (Parameter setting)
- Checking if the light curtain disturbs itself or not.
- Checking if the logic relation of controller matches to the setting parameter of door-motor transducer (NOTE: Individual controller receives position limit signal, then gives open door signal if the loop of door lock is not connected during about 200ms). Here, the parameter F32 of close door slow speed zoon of door-motor transducer should be adjusted; F39 and F54 give time to reach the requests of controller.
6��3 After half a year, taking apart the door-motor, checking the locknut, adjusting the elasticity of chain, adding oil to the two oil holes to ensure the normal function, subsequently reverting the door-motor.
7��INSTALLATION AND CABLING INSTRUCTION OF VVVF OPEN DOOR MOTOR
7��1 Structure form of open door motor
7��1��1Type I includes: Door-motor bracket, across bar, driver group, passivity wheel group,synchro belt, wedges belt, machine, controller, encoder, limit position bump block,synchro belt clip and so on, see attached drawing 2 for details.
7��1��2Type II includes: Soleplate, three phases asynchronism motor, transmission belt, decelerating wheel and bracket, encoder, controller, outside terminal line, damping glue cushion, limit position block and shell. See attached drawing 3 for details.
7��1��3Type III includes: Door-motor ban, driver group, passivity wheel group, synchro belt, wedges belt, machine, controller, encoder, bracket and synchro belt clip and so on, see attached drawing for details.
7��2Installation methods
7��2��1Type I open door motor: Fixing bracket on former cabin top by M6��20 bolts, adjusting
connection of synchro belts. Fixing former and back ��up and down position of bracket
by M8��25 bolts, then fixing stand frames and side frames. Windage of parallel and
plumb degree should be in 0.5mm.
7��2. 2Type II open door motor:
7��2��2.1 Taking off the crust of device then installing it on cabin top according to sketch map. (Viz. position of MRDS, see attached drawing 3). Damping glue cushion must be filled between soleplate and cabin top channel.
7��2.2��2 Connecting axis of rotation and brace of decelerating wheel (see attached drawing 3).
7��2.2��3 After adjusting brace and pole according to adjusting standards of elevator open door motor, locking up soleplate.
7��2. 3 Type III open door motor: Fixing door-motor ban and cabin door header by M8��25 bolts,
fixing joinings and two stand side bans by M8��25 bolts at two ends, windage of
parallel and plumb degree should be in 0.5mm.
7��3 Cabling methods
Cabling of type �� accords to attached form 1, cabling of type ��-PRM accord to attached form 2. After checking, covering device by crust and locking up. Note that all control wires must drill through the obligated holes on crust.
Attached drawing 1
Attached drawing 1:cabling drawin