|
Parameter-NO |
Parameter designation |
setting value |
description |
|
1 |
Displaying parameter |
2 |
0-displaying the pulse1-displaying the speed 2-displaying the percentage |
|
2 |
Tans speed mode |
1 |
1-adopt internal storage curve0-adopt subsection speed Every speed and trans speed position can be debugged. |
|
3 |
Emendation of door width |
1.0 |
The parameter is main for getting rid of the error in the process of self-learning. |
|
4 |
Throw-over position 1 of open door |
2 |
Less than the position use the “subsection speed 1 of open door” |
|
5 |
Throw-over position 2 of open door |
20 |
More than the position and less than “Throw-over position 3 of open door” use the “subsection speed 2 of open door” |
|
6 |
Throw-over position 3 of open door |
45 |
More than the position and less than “Throw-over position 3 of open door” use the “subsection speed 2 of open door” |
|
7 |
Throw-over position 4 of open door |
90 |
More than the position and less than “Throw-over position 5 of open door” use the “subsection speed 4 of open door” |
|
8 |
Throw-over position 5 of open door |
98 |
More than the position use the “subsection speed 5 of open door |
|
9 |
Throw-over position 1 of close door |
98 |
More than the position use the “subsection speed 1 of close door |
|
10 |
Throw-over position 2 of close door |
85 |
More than the position and less than “Throw-over position 1 of close door” use the “subsection speed 2 of open door” |
|
11 |
Throw-over position 3 of close door |
45 |
More than the position and less than “Throw-over position 2 of close door” use the “subsection speed 3 of open door” |
|
12 |
Throw-over position 4 of close door |
30 |
More than the position and less than "Throw-over position 3 of close door" use the "subsection speed 4 of open door" |
|
13 |
Throw-over position 5 of close door |
4 |
Less than the position use the “subsection speed 5 of close door |
|
14 |
Subsection speed 1 of open door |
10 |
Unit: RPM/m |
|
15 |
Subsection speed 2 of open door |
105 |
Unit: RPM/m |
|
16 |
Subsection speed 3 of open door |
115 |
Unit: RPM/m |
|
17 |
Subsection speed 4 of open door |
70 |
Unit: RPM/m |
|
18 |
Subsection speed 5 of open door |
12 |
Unit: RPM/m |
|
19 |
Subsection speed 1 of close door |
20 |
Unit: RPM/m |
|
20 |
Subsection speed 2 of close door |
80 |
Unit: RPM/m |
|
21 |
Subsection speed 3 of close door |
115 |
Unit: RPM/m |
|
22 |
Subsection speed 4 of close door |
65 |
Unit: RPM/m |
|
23 |
Subsection speed 5 of close door |
10 |
Unit: RPM/m |
|
24 |
The torque limit of opening door |
400 |
When the door open and the torque exceeds the value, the door motor begun to re-start learning. |
|
25 |
The torque limit of opening door push |
200 |
After “door open”, the biggest torque of door motor push |
|
26 |
Compel send “door open” signal |
26 |
The codes mission in the process of door open can cause the “door open fully” signal can’t be output when the door have opened fully. Extend the time of the parameter and compel output the “door open fully” signal to reset learning run. The unit is “second”. |
|
27 |
Timing of open door pushing t |
100 |
The time of door motor pushing after door open fully. When the parameter volume is 100,the door motor keep pushing always. |
|
28 |
Timing of close door pushing |
100 |
The time of door pushing after door close fully. When the parameter volume is 100,the door keep pushing always. |
|
29 |
Close door torque limit |
400 |
When the torque of door closing Exceeds the value, the door motor run reversely to “door open fully” and close the door again. |
|
30 |
Close door pushing torque limit |
150 |
After door close fully, the largest torque of the door motor pushing. |
|
31 |
Open door pushing speed |
5 |
The speed of opening door pushing. |
|
32 |
Close door pushing speed |
3 |
The speed of closing door pushing. |
|
33 |
Pointed position |
30 |
When the door motor run to the position, it output pointed position relay signals. |
|
34 |
Door open fully |
99 |
When the door motor run to the position, it output door open fully relay signals and start to open door pushing. |
|
35 |
Door close fully |
1 |
When the door motor run to the position, it output the relay signals of “door close fully” and the motor start to close door pushing. |
|
36 |
speed of opening door |
75 |
The speed of opening doorThe bigger number, the higher speed and vice versa. |
|
37 |
Speed of closing door |
75 |
The speed of closing doorThe bigger number, the higher speed and vice versa. |
|
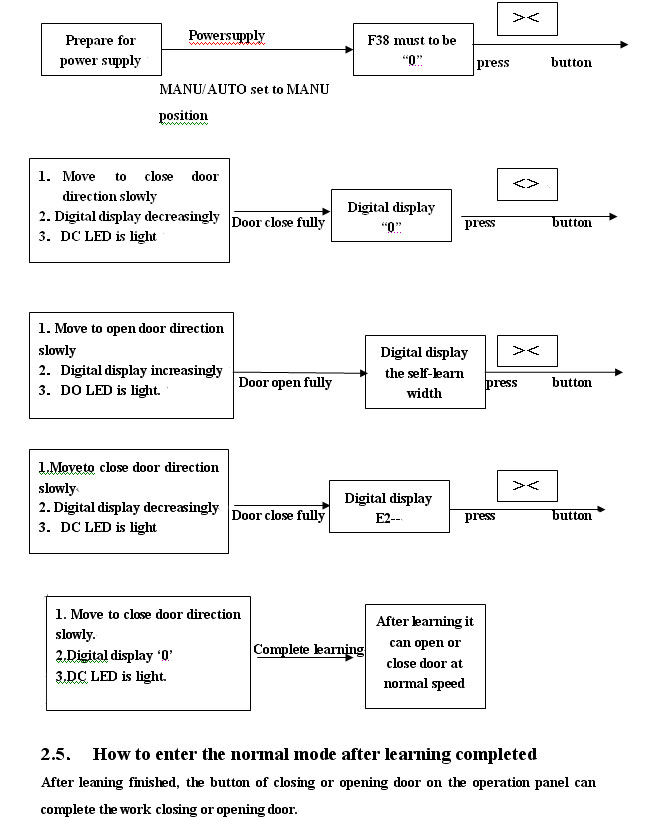
38 |
Learning run memory mode |
0 |
0-“No memory”1-Memorise “the memory”When the controller is power outage or reset, there is no need to learn again and in contrast, “No memory” need to learn again. |
|
39 |
Speed of compel close door |
15 |
Light push closing doorThe bigger number, the higher speed. |
|
40 |
Types of errors |
Random Number |
01-undervoltage protection, 02-overvoltage protection,
04-overcurrent protection |
|
41 |
parameter protection |
9998 |
Only when the parameter is 9999,you can set other parameters. |
|
42 |
Hidden parameter |
9998 |
When the parameter is 9999, that can show the Hiddenparameters (the parameters behind of F42) |
|
43 |
The sum of pulse of learning run |
Random number |
The sum of pulses of door width |
|
44 |
Normal speed of learning run |
15 |
The speed of self-learning “open and close door” |
|
45 |
KPSD |
512 |
PID ratio Coefficient |
|
46 |
KPSD |
16 |
PID Integral Coefficient |
|
47 |
KPSD |
0 |
PID Differential Coefficient |
|
48 |
mode parameter |
0 |
After set the parameter, read the corresponding mode from the Flash of DSP and change the parameters 3-35. |
|
49 |
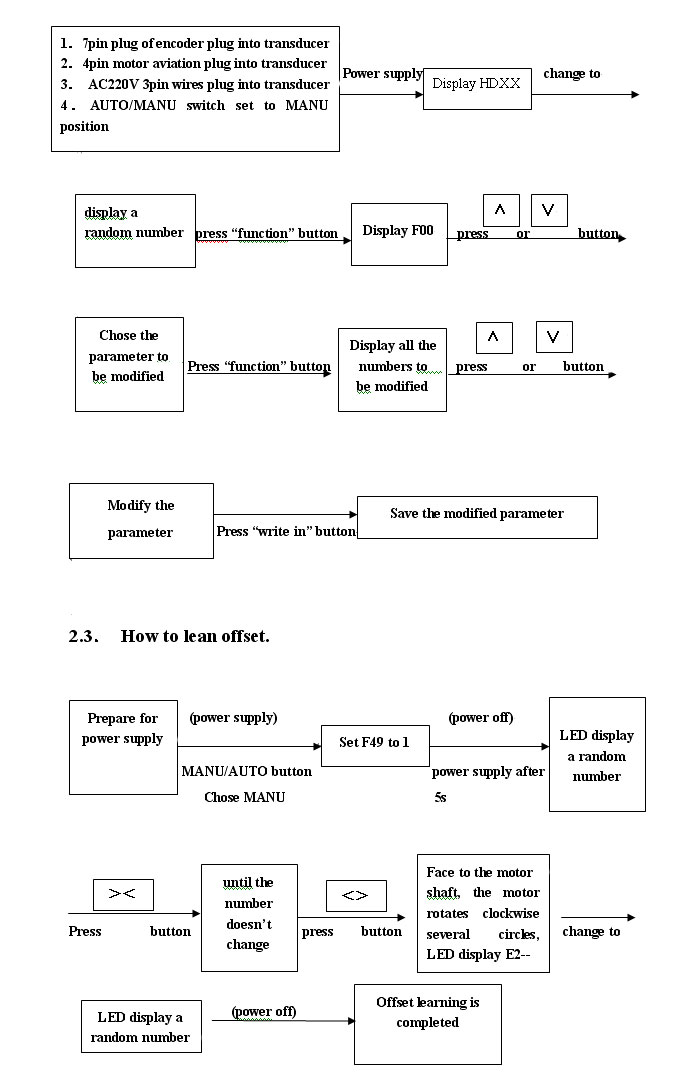
Setting of offset learning |
1 |
0-learning, 1-no learningThe user can’t tamper with it or the door operator will not work. |
|
50 |
Learning offset volume |
Set |
Be set before out of factory, so the user can’t tamper with it or the door operator will not work. |
|
51 |
reserve |
|
|
|
52 |
Learned torque limit |
200 |
the largest torque of learning run |
|
53 |
Blocking current maximum allowed |
716 |
The protection value of the blocking current caused by the encoder damage during the door open/close or other reasons. |
|
54 |
Blocking allowable time |
30 |
The duration when over the protection value of the blocking current. |
|
F55 |
The choice of the door knife type |
0 |
0-The running curve of asynchronous door knife
1-The running curve of synchronous door knife |
|
F56 |
The factory keeps the parameter |
1 |
This parameter must be set to 1, or the door operator will not work. |
|
F57 |
The factory keeps the parameter |
1400 |
Used in the check of the product during the production. |
|
F58 |
The factory keeps the parameter |
25 |
Used in the check of the product during the production. |
|
F59 |
The factory keeps the parameter |
0 |
Used in the check of the product during the production. |
|
F60 |
The factory keeps the parameter |
1300 |
Used in the check of the product during the production. |
|
F61 |
The readin pulse
(The width of open or close door) |
2 |
1-Can readin 2048(The motor shaft rotates 8 circle);
2-Can readin 4096(The motor shaft rotates 16 circle) |
|
F62 |
The motor rotation direction of open or close door |
0 |
0- Face to the motor shaft, clockwise is open,
counter-clockwise is close;
1- Face to the motor shaft, clockwise is close,
counter-clockwise is open.
|
|
F63 |
Door knife speed |
50 |
The speed of the door knife when the door is closing and after the two panels close completely.(Note 1) |
|
F64 |
The position of the door knife |
30 |
The running distance of the door knife after the panels closed completely. (Note 1) (Note 2) |
|
F65 |
Fault restoration enable |
1 |
When show the characters means overvoltage or overcurrent F65=1 means restoration and F65=0 means “don’t restore”. |